Agents
Agent types
four basic kinds of agent programs will be discussed:
- simple reflex agents
- model-based reflex agents
- goal-based agents
- utility-based agents all of these can be turned into learning agents
Table-lookup agent (bad)
drawbacks:
- huge table → memory constraints
- takes a long time to build the table
- no autotomy
- no agent could ever learn all the right table entries from it’s experience
Simple reflex agent
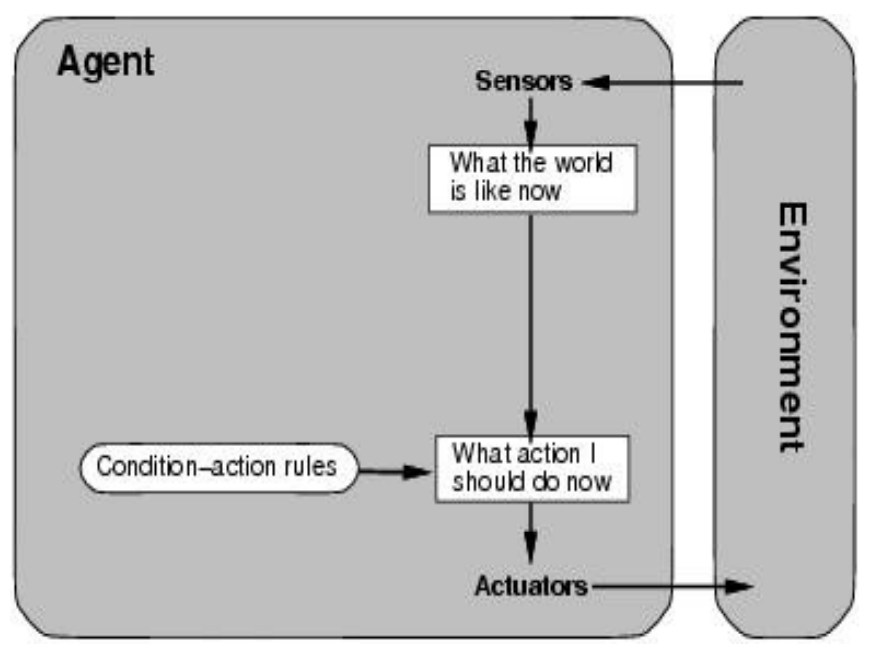
Simple reflex agent: rectangles indicate the current internal state of the agent’s decision process, and ovals represent the background information used in the process.
- select action based on the current precept
- large reduction in possible percept/action situations
- implemented through condition-action rules
- e.g. if dirty then suck (vacuum)
Pseudocode:
function SIMPLE-REFLEX-AGENT(percept) returns an action
static: rules, a set of condition-action rules
state <- INTERPRET-INPUT(percept)
rule <- RULE-MATCH(state, rule)
action <- RULE-ACTION[rule]
return actionModel-based reflex agent
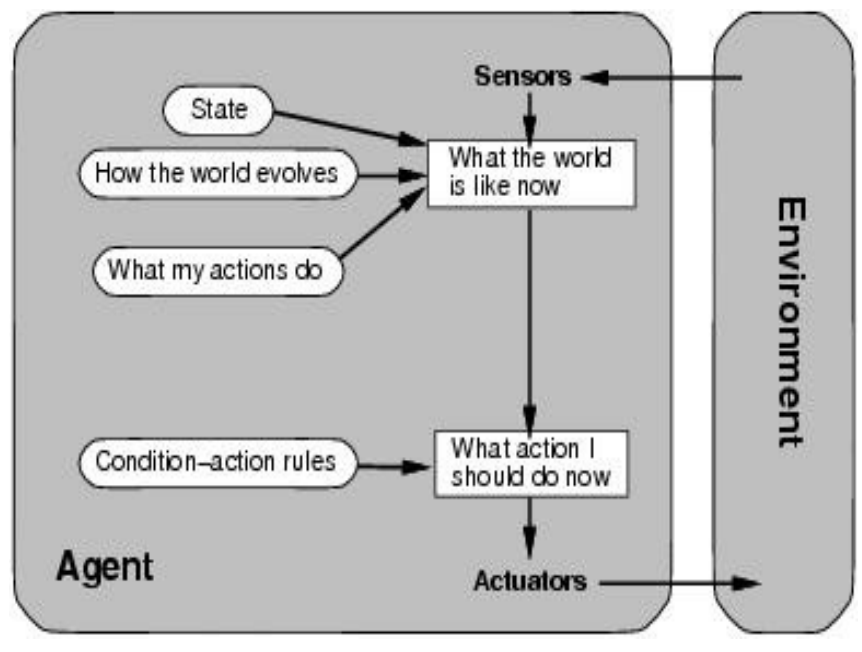
- used to tackle partially observable environments
- maintain internal state that depends on the percept history
- e.g. agent keeps track of the part of the world it can’t see now (has history)
- keep history of how the world changes, how do agent actions affect the world → create model of the world
Goal-based agent
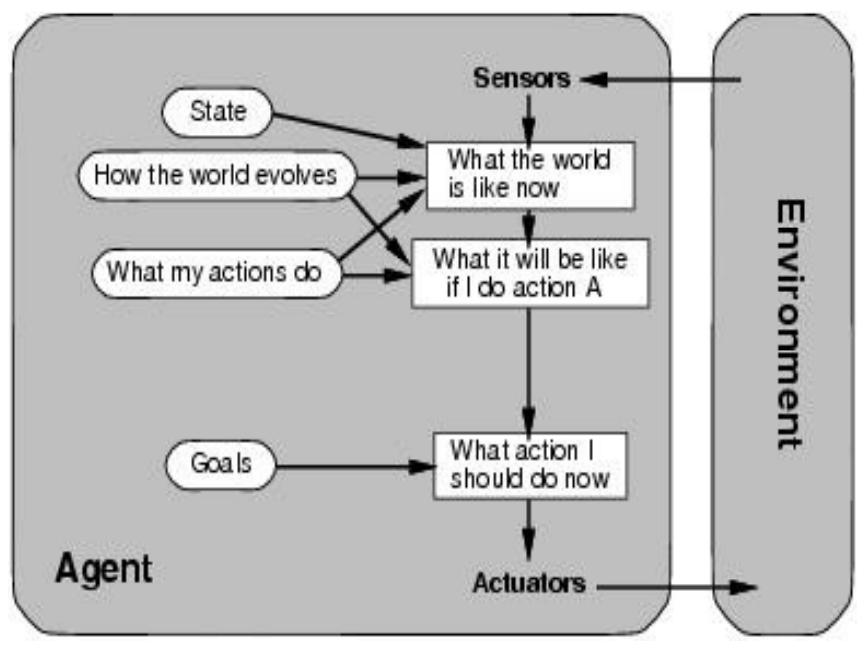
A model-based, goal-based agent. It keeps track of the world state as well as a set of goals it is trying to achieve, and chooses an action that will (eventually) lead to the achievement of its goals
- the agent needs a goal to know which situations are desirable
- things become difficult when long sequences of actions are required to find the goal
- typically investigated/used in search and planning research
- major difference: the future is taken into account
- is more flexible since knowledge is represented explicitly and can be manipulated
Utility-based agent
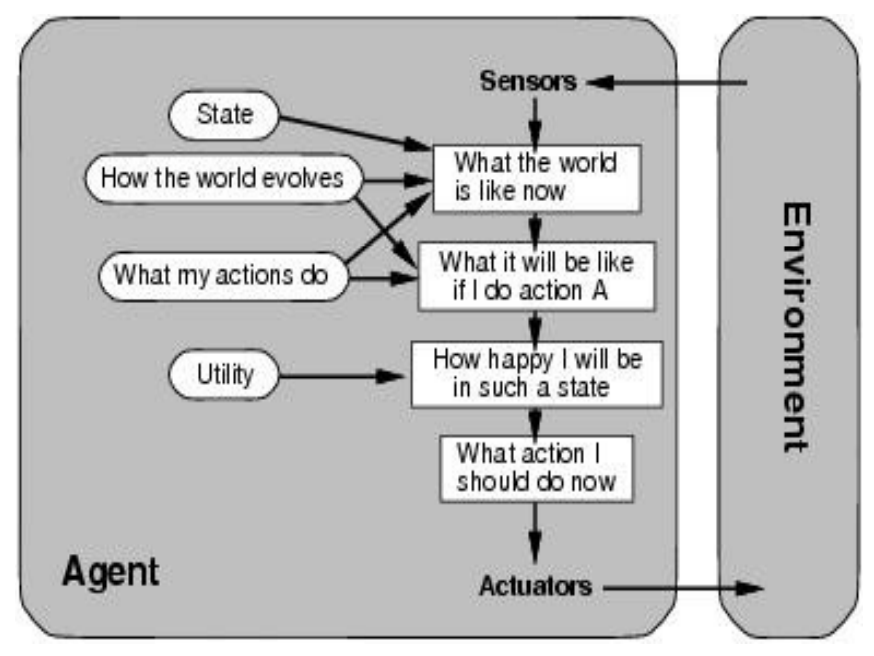
A model-based, utility-based agent. It uses a model of the world, along with a utility function that measures its preferences among states of the world.
- certain goals can be reached in different ways
- some are better; have a higher utility
- utility function maps a (sequence of) state(s) onto a real number
- improves on goals:
- selecting between conflicting goals
- select appropriately between several goals based on likelihood of success
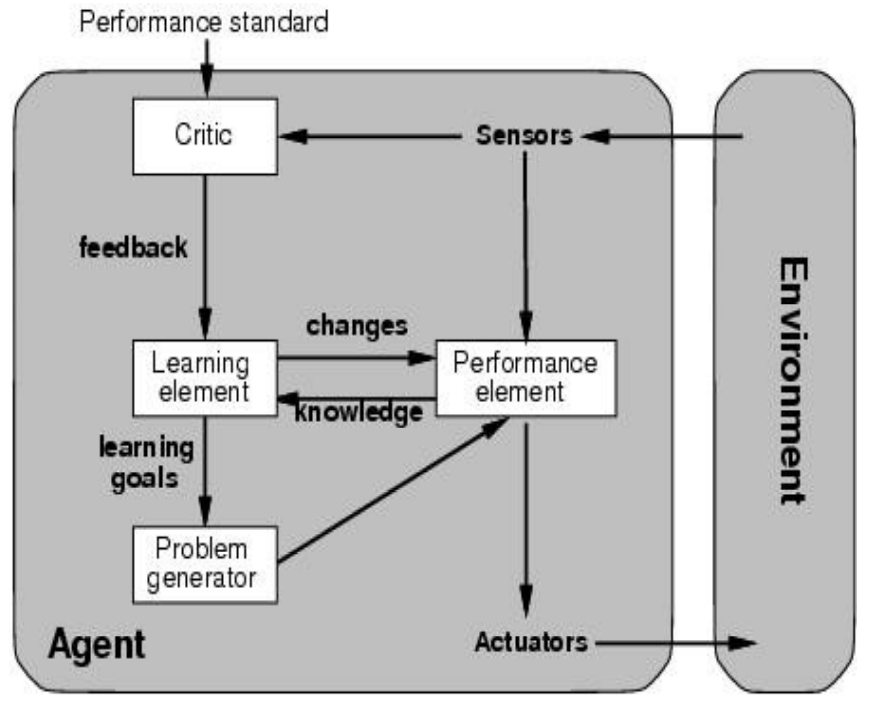
Learning agent
- all previous agent-programs describe methods for selecting actions, previous agent programs:
- do not explain the origin of these programs
- learning mechanisms can be used to perform the task
- teach them instead of instructing them
- advantage is the robustness of the program toward initially unknown environments
- Learning element: introduce improvements in performance element
- critic provides feedback on agent performance based on fixed performance standard
- Performance element: selecting actions based on precepts
- corresponds to the previous agent programs
- Problem generator: suggests actions that will lead to new and informative experiences
- exploration vs exploitation
Supervised & unsupervised learning
Supervised
- “there is a teacher that says yes or no”
- training data comes with an expected outcome
Unsupervised
- is only given the training data → no expected outcome
- e.g. creating an agent that learns to classify sutff
- classifies in it’s own way
Solving problems by searching
essentially BFS & DFS