Agents
Agent definitions
- Agent: something that takes in information from its surroundings (sensors) and does something in response (actuators)
- Agent function: rule or process that tells an agent what actions to take
- Agent program: the actual implementation of the agent function
- Percept: agent sensor input (text, images, sounds, etc.)
- Percept sequence: chatgpt history (history of what the agent has had as inputs)
- Rational: reasonably correct (does not need to be perfect), depends on 4 things:
- performance measure
- agent’s prior knowledge of the environment
- actions the agent can perform
- percept history to date
- Rational agent: an agent that selects the action that maximizes performance measure (“does the right thing”)
- Performance measure: a way to judge how well an agent is doing its job (e.g. chess game → win rate, self driving car → reaching destination safely and quickly, recommendation system → how often users click/like suggestions)
- PEAS framework:
- Performance measure
- Environment: the surroundings the agent operates in
- Actuators: the parts that lets the agent take action (wheels, arms, display, …)
- Sensors: the parts that let the agent perceive or gather information (camera, microphone, GPS, …)
Environment types:
- Fully observable vs partially observable
- Fully observable: agent can see everything it needs to make a decision (e.g. chess)
- Partially observable: agent only sees part of the environment (e.g. driving in fog)
- Deterministic vs stochastic
- Deterministic: the next state is completely determined by the current state and action (no randomness)
- Stochastic: there is some randomness in what happens next
- Episodic vs sequential
- Episodic: each action is independent → what you do now doesn’t effect the next (e.g. image recognition)
- Sequential: actions build on each other, past decisions matter (e.g. chess, driving)
- Static vs dynamic
- Static: environment doesn’t change while the agent is thinking (e.g. crossword puzzle, sudoku)
- Dynamic: environment changes over time, even if the agent is not acting (e.g. real world, driving)
- Discrete vs continuous
- Discrete: limited number of possible states (e.g. chess, other board games)
- Continuous: states and actions can take any value (e.g. driving speed, robot arm angles)
- Single vs multi agent
- Single-agent: only one agent is acting (e.g. solving a maze)
- Multi-agent: multiple agents interact, possibly competing or cooperating (e.g. soccer, trading bots)
Agent types
-
Simple reflex agent: acts only based on current situation, uses conditional rules
- only works in fully observable environments
-
Model-based reflex agent: keeps some internal memory (model) of the world, uses current input and past information to decide what to do
- used in partially observable environments
-
Goal-based agent: has specific goals it tries to achieve, can plan ahead and compare different possible outcomes
-
Problem-solving agent: a type of goal-based agent that uses search and planning to find a way to reach its goal
- Problem-solving cycle:
- goal formulation → define desirable states
- problem formulation → identify states and actions relevant to goal
- search → find sequences of actions that reach goal
- execution → carry out actions — Utility-based agent: tries to maximize performance, uses utility function to measure how good each action is
- utility: numerical value representing how desirable an outcome is; utility-based agents choose actions with highest expected utility
- Problem-solving cycle:
-
Learning agent: improves over time by learning from experience
Genetic Algorithms
Darwinian Evolution Principles
- Survival of the fittest: resources are limited, only the most adaptable individuals reproduce, selection ensures only efficient competitors survive
- Diversity drives change:
- behavioural/physical differences are partly inherited, partly random
- traits increasing reproduction chances and heritable → spread over generations
- leads to new combinations and evolutions of species
- Population dynamics:
- population = unit of evolution
- individual = unit of selection
- random variations + selection = constant diversity source
- no guiding force → evolution is emergent, not directed
Natural & biological evolution
- Alleles: possible values of a gene
- Chromosomes: long DNA molecules containing many genes
- Genome: complete genetic material
- Genotype: gene set of an individual
- Phenotype: observable characteristics from genotype
- Key conditions for evolution:
- Reproduction with inheritance: individuals make copies of themselves
- copies should resemble their parents (not be duplicates)
- Variation: ensure that copies are not identical to parents
- mutations, crossover produces individuals with different traits
- Selection: need a method to ensure that some individuals make copies of themselves more than others
- fittest individuals (favourable traits) have more offspring than unfit individuals, and population therefore has those traits
- over time, changes will cause new species that can specialize for particular environments
- Reproduction with inheritance: individuals make copies of themselves
Genetic Algorithms
| Natural Concept | Genetic Algorithm Equivalent |
|---|---|
| Chromosome | solution representation |
| Gene | feature or variable |
| Allele | feature falue |
| Locus | gene position |
| Genotype | encoded structure (solution encoding) |
| Phenotype | decoded solution (actual parameters) |
Main steps
- Initialization: generate initial population
- Evaluation: compute fitness for each solution
- Selection: choose individuals for reproduction
- Crossover: mix parents to create children
- Mutation: introduce random variations
- Replacement: update population for next generation
- Termination: stop when condition met (e.g. max generations, target fitness hit)
Key variants
- Simple GA (SGA): full population replaced each generation
- Steady-state GA: only a few individuals replaced each iteration
- elitism: copy a few best individuals unchanged into the next generation so high-fitness solutions are preserved
Selection methods
- Tournament selection: select random individuals and keep the best for reproduction, repeat until you have a chosen amount of parents
- Roulette wheel selection: probabilistic selection based on fitness,
Premature Convergence
- the population consists of similar individuals, it reduces likelihood of finding new solutions
Genetic Operators
- Crossover: a method of combining two candidates from. the population to create new candidates
- Mutation: lets offspring evolve in new directions → introduces a certain amount of randomness (certain traits may become fixed)
- Replication: copy an individual
Crossover Operations
- 1-point crossover:
Step 1: Choose random crossover point
P1: 1 2 3 | 4 5 6 7
P2: 7 6 5 | 4 3 2 1
↑ crossover point
Step 2: Swap segments after crossover point
C1: 1 2 3 | 4 3 2 1
C2: 7 6 5 | 4 5 6 7
✅ Final Offspring
C1: 1 2 3 4 3 2 1
C2: 7 6 5 4 5 6 7
- 2-points crossover:
Step 1: Choose two random crossover points
P1: 1 2 | 3 4 5 | 6 7
P2: 7 6 | 5 4 3 | 2 1
↑ ↑
crossover points
Step 2: Swap middle segments between parents
C1: 1 2 | 5 4 3 | 6 7
C2: 7 6 | 3 4 5 | 2 1
✅ Final Offspring
C1: 1 2 5 4 3 6 7
C2: 7 6 3 4 5 2 1
- Uniform crossover (UX): each gene has a 50% chance of being inherited from either parent
Step 1: Generate random mask
P1: 1 2 3 4 5 6 7
Mask: 1 0 1 0 0 1 0
P2: 7 6 5 4 3 2 1
Step 2: Copy by mask (1 → from P1, 0 → from P2)
C1: 1 6 3 4 3 6 1
C2: 7 2 5 4 5 2 7
✅ Final Offspring
C1: 1 6 3 4 3 6 1
C2: 7 2 5 4 5 2 7
- Order crossover (OX):
- copying a randomly selected set from the first parent
- filling the remaining positions with the order of elements from the second
Step 1: Copy randomly selected set from first parent
p1: 1 2 3 4 5 6 7 8 9
p2: 9 3 7 8 2 6 5 1 4
c1: * * * 4 5 6 7 * *
c2: * * * 8 2 6 5 * *
Step 2: Copy rest from second parent in order
Remaining order from p2: 1, 9, 3, 8, 2
C1: 3 8 2 4 5 6 7 1 9
C2: ?
Step 1: Copy randomly selected set from first parent
p1: 1 2 3 4 5 6 7 8 9
p2: 4 5 2 1 8 7 6 9 3
c1: * * * 4 5 6 7 * *
Step 2: Copy rest from second parent in order
Remaining order from p2: 9, 3, 2, 1, 8
C1: 2 1 8 4 5 6 7 9 3
- Uniform order crossover (UOX):
Step 1: Setup
Parents (P1, P2) and Mask
P1: 6 2 1 4 5 7 3
Mask: 0 1 1 0 1 0 1 → generate new mask for every 2 parents
P2: 4 3 7 2 1 6 5
Step 2: Copy Genes by Mask
- Copy genes from P1 → C1 where mask = 1
- Copy genes from P2 → C2 where mask = 1
C1: - 2 1 - 5 - 3
C2: - 3 7 - 1 - 5
Step 3: Fill Remaining from Opposite Parent
- Fill blanks (-) with remaining genes from the other parent in order
C1: 4 2 1 7 5 6 3
C2: 6 3 7 2 1 4 5
✅ Final Offspring
C1: 4 2 1 7 5 6 3
C2: 6 3 7 2 1 4 5
- Partially mapped crossover (PMX): preserves relative order and position (used for permutation problems)
Step 1: Select two crossover points
P1: 1 2 | 3 4 5 | 6 7 8
P2: 4 5 | 6 7 8 | 1 2 3
Step 2: Copy middle section from P1 → C1
C1: * * | 3 4 5 | * * *
Step 3: Map remaining genes from P2 using the mapping of swapped section
Mapping: 3↔6, 4↔7, 5↔8
Fill remaining using P2 order, applying mapping:
P2 order: 4 5 6 7 8 1 2 3
→ Apply mapping to avoid duplicates
✅ Final Offspring
C1: 6 7 | 3 4 5 | 8 1 2
- Cycle crossover (CX): every gene comes from one parent in the same same index across cycles
Step 1: Find cycles based on position mapping
P1: 1 2 3 4 5 6 7
P2: 3 7 5 1 6 2 4
Mapping:
1 → 3 (pos3) → 5 (pos5) → 6 (pos6) → 2 (pos2) → 7 (pos7) → 4 (pos4) → 1
Cycle: (1,3,5,6,2,7,4)
Step 2: Copy first cycle from P1, rest from P2
C1: 1 2 3 4 5 6 7
C2: 3 7 5 1 6 2 4
✅ Final Offspring
C1: 1 2 3 4 5 6 7
C2: 3 7 5 1 6 2 4
Mutation
- Inversion: reversed order of selected segment of genes
9 3 7 8 2 6 5 1 4 → 9 3 6 2 8 7 5 1 4
- Insertion: select one gene and insert it into a random position
9 3 7 8 2 6 5 1 4 → 9 7 8 2 3 6 5 1 4
- Displacement: select a subtour (continuous segment) and reinsert it somewhere else
9 3 7 8 2 6 5 1 4 → 9 8 2 6 5 3 7 1 4
- Reciprocal exchange (swap): select two genes and swap their positions
9 3 7 8 2 6 5 1 4 → 5 3 7 8 2 6 9 1 4
- Scramble mutation: select a subset of genes and randomly shuffle their order
9 3 7 8 2 6 5 1 4 → 9 3 6 8 7 2 5 1 4
EVERYTHING ABOVE IS PRE-MIDTERM
Games (Adversarial Search)
-
adversarial, multi-agent environments (MAX vs MIN)
-
defined by: initial state, legal moves, terminal test, utility
-
game tree → nodes = states, edges = moves, ply = depth layer
-
full search often impossible → rely on heuristics + cutoff
-
what makes a game different from normal search?:
- multi-agent, competitive, adversarial
- opponent affects your outcome
- need a strategy, not just a path
- goal: choose actions that maximize your payoff against an optimal opponent
Minimax
- idea:
- perfect play under deterministic, perfect-information games
- MAX chooses move with the highest worst-case value
- assume opponent is rational and tries to minimize your score
- procedure:
- expand game tree to some depth
- evaluate leaf nodes with evaluation function
- back up values:
- MAX nodes take max of children
- MIN nodes take min of children
- choose best move at root
- properties:
- complete (if tree finite)
- optimal (against optimal opponent)
- expensive: time, space
Alpha-beta pruning
- purpose:
- avoid evaluating branches that cannot affect the final decision
- works alongside minimax → same final answer, faster search
- key ideas:
- (alpha): best score MAX can guarantee so far
- (beta): best score MIN can guarantee so far
- if a branch is already worse than what a player can get elsewhere → prune it
- benefits:
- eliminates huge parts of tree
- with good move ordering, reduces time from to
- allows deeper search within the same time
Evaluation functions
- used when search is cut off early
- heuristic score estimating “how good” a state is
- usually weighted sum of features
- must correlate with probability of winning
Cutoff search
- search only to fixed depth (resource limits)
- evaluate non-terminal states using evaluation function
- risk: horizon effect (bad events hidden beyond depth)
Search enhancements
- iterative deepening: search 1 ply, then 2, then 3.. until time expires
- quiescence search: extend search in volatile positions (captures, threats)
- move ordering: improves alpha-beta effectiveness
- singular extension: explore unusually promising moves deeper
Swarm Intelligence
Ant Colony Optimization (ACO)
- population-based stochastic (some randomness) search using ants and pheromone
- ants choose edges probabilistically based on pheromone + visibility
- positive feedback: good paths get reinforced
- evaporation: keeps pheromone from exploding → forces exploration
- loop: create ants → build solution → evaporate → add pheromone
- needs graph representation; finite path
- issues: converges fast
Particle Swarm Optimization (PSO)
- swarm of particles moving in search space
- each particle has position and velocity
- particles remember:
- personal best (pbest)
- global best (gbest)
- velocity updated using:
- momentum (old velocity)
- pull toward pbest
- pull toward gbest
- movement influenced by randomness → exploration
- fast convergence but may get stuck if swarm collapses early
Learning & Machine Learning
-
machine learning: programs that improve with experience
-
Mitchell’s definition: learns if performance on task T improves using experience E measured by P
-
checkers ML example (T/P/E):
- Task (T): play checkers
- Performance (P): % games won
- Experience (E): games of self-play used as training data
-
types of learning
- supervised: labeled data (classification, regression)
- unsupervised: no labels (clustering)
- reinforcement: reward-based learning
- exploration vs exploitation: balance between trying new actions to gather information vs using known high-reward actions
-
supervised examples: decision tree classifier, perceptron/NN classifier
-
unsupervised examples: k-means, hierarchical clustering
Designing a learning system
- choose training experience
- choose target function
- choose representation (rules, tables, linear model, neural networks)
- choose learning algorithm (e.g. gradient descent)
Memorization vs generalization
- memorization: model stores training examples, performs poorly on new data
- generalization: model learns underlying patterns, performs well on unseen data
- overfitting: too much memorization, not enough generalization
Training experience issues
- must be representative (training examples must reflect real situations the agent will face)
- e.g. if a spam filter is trained on only old emails, it won’t generalize to modern spam
- feedback may be direct (correct answer provided) or indirect (reinforcement → only rewards or signals)
- may or may not involve a teacher (provided correct labels vs learner must find structure)
- e.g. clustering animals without knowing categories
- bad data (noisy, biased, incomplete, incorrect labelling, …) harms performance
ML challenges
- model complexity:
- too simple → underfitting (can’t capture patterns)
- too complex → overfitting (memorizes training data)
- training data size: more data → generally better performance, too little → poor generalization
- noise in data: incorrect labels or irrelevant features degrade accuracy
- learnability limits: some things are inherently hard to learn
- e.g. predicting stock price → hard due to chaotic signals
- prior knowledge: using domain knowledge can constrain hypotheses and improve learning
- e.g. knowing legal moves in chess reduces search space → better performance
Decision Trees & Overfitting
Decision trees
- supervised learning method for classification
- recursively split data based on attributes
- internal nodes = tests; branches = outcomes; leaves = class labels
- good for data with clear, rule-line data
- handles discrete or continuous attributes (continuous → threshold tests)
How to build one
- choose attribute that best separates data
- common criteria:
- information gain (IG): reduction in entropy (uncertainty) after a split
- gain ratio: normalizes IG by attribute branching factor
- repeat splitting on subsets until:
- all examples in node have same class
- no attributes left
- data too small
Advantages
- interpretable (human-readable rules)
- fast to train
- little data preprocessing required
- can capture non-linear boundaries
Disadvantages
- unstable (small data changes → different tree)
- greedy splitting may miss globally optimal tree
- prone to oversplitting
- optimal tree size: finding the smallest decision tree is NP-hard → practical algorithms use greedy heuristics instead of exhaustive search
Overfitting (in decision trees)
- model becomes too specific to training data
- memorizes noise instead of learning patterns
- tree grows too deep with many small, impure leaves
Signs of overfitting
- high accuracy on training data & low accuracy on unseen data
- branches based on rare or noisy attribute combinations
Causes
- noisy data
- too many attributes
- insufficient training examples
- splitting until leaves are tiny (one or few samples)
Preventing overfitting
- pre-pruning: stop early
- limit tree depth
- minimum samples per node
- require split to exceed IG threshold
- post-pruning: build full tree, then trim
- remove branches that do not improve validation accuracy
- replaces overfitted subtrees with leaf nodes
- cross-validation: ensures splits generalize
- simplify attributes: remove irrelevant features
Neural Networks
- model made of neurons connected by weighted edges
- each neuron: sum of inputs → apply activation function → output
- learning = adjusting weights so outpus match targets
Perceptron (single layer network)
- linear classifier (straight line decision boundary)
- works only for linearly separable problems
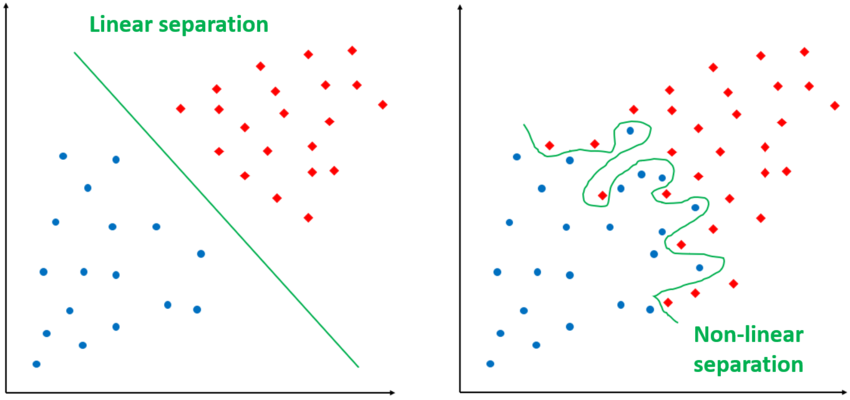
- weight update rule reduces classification error
- limit: cannot learn XOR or any non-linear separation
Why multilayer networks?
- add hidden layers → can learn non-linear functions
- input → hidden (can be multiple) → output
- hidden units combine features → represent complex patterns
Activation functions
- a rule that transforms a neuron’s summed input into its output, adding the non-linearity needed for neural networks to learn complex patterns
- common forms:
- step/sign function: perceptron-style (not differentiable, not usable for backprop)
- sigmoid/tanh: smooth, differentiable → needed for backprop
- choice affects learning speed + representational power
Training neural networks
- forward pass:
- input flows through layers to produce prediction
- back-propagation (error-correcting learning):
- compare prediction to target → compute error
- send error backwards through network
- adjust weights using gradient descent
- requires differentiable activation functions
- intuition:
- if output is wrong → adjust weights that contributed to error
- small learning rate = stable but slow
- large learning rate = fast but unstable
Strengths
- learns complex, non-linear patterns (multi-layer)
- good for classification, pattern recognition, noisy data
- no need for explicit rules → model “discovers” structure
Limitations
- weights are a black box → poor interpretability
- can overfit (memorize training data)
- needs lots of data + careful tuning
- training may get stuck in local minima (gradient descent)
Clustering
- unsupervised learning: group similar data points without labels
- goal: high similarity within clusters, low similarity between different clusters
- works only if real structure exists in data
- results must be interpreted → algorithm will always produce clusters, even if meaningless
- examples: images, patterns, documents, shopping items, biological data, social networks
Hierarchical clustering
- builds a tree of nested clusters
- no need to pick the number of clusters beforehand
- two types:
- agglomerative: start with each point alone → repeatedly merge closest clusters
- divisive: start with all points together → repeatedly split
Linkage criteria (how to measure distance between clusters):
- single linkage: nearest points → long “chain-like” clusters
- complete linkage: farthest points → compact clusters
- average linkage: average distance → balances sensitivity
- centroid linkage: distance between cluster centroids
Limitations
- early merge/split decisions cannot be undone
- choosing where to “cut” the tree is subjective
Partitioning clustering
- choose (number of clusters) first
- assign points to clusters based on similarity to representatives
K-means
- most common partitioning clustering method
- tries to minimize distances between points and their cluster centers (centroids)
How it works
- pick initial centers
- assign each point to nearest center
- recompute centers
- repeat until stable
Strengths
- simple, fast, handles large datasets
- can adjust assignments if initial choices were bad
Weaknesses
- sensitive to initial needs
- not guaranteed to find the optimal clustering
- must choose manually
- can get stuck in local minima
Validation
- why validate?: clustering always produces groups → need to check if they’re meaningful
- ways to validate:
- internal: based on cluster quality (tightness, separation)
- external: compare to known labels or external variables
- relative: compare results across different values or algorithms
Common difficulties
- choosing the right number of clusters
- noise and outliers distort cluster structure
- results depend heavily on distance measure
- hard to visualize high-dimensional clusters
- multiple valid clusterings may exist for the same dataaf
Logic
Common Logic Symbols
| Symbol | Meaning | Example | Plain English Explanation |
|---|---|---|---|
| not | ”Not P” → P is false | ||
| and | P and Q are both true | ||
| or (inclusive) | At least one of A or B is true | ||
| implies | If P is true, then Q must also be true | ||
| biconditional (iff) | P is true exactly when Q is true | ||
| equality | x and y are the same object/value | ||
| universal quantifier (“for all”) | Everybody loves pizza | ||
| existential quantifier (“there exists”) | At least one student exists | ||
| relation between objects | Alice and Bob are friends | ||
| Function | returns an object | ”John’s father” | |
| Variables | placeholders for objects | P applies to some object x |
Knowledge Representation (KR)
- express knowledge in a form the agent can use
- good KR: explicit, concise, suppresses irrelevant detail, supports reasoning
Logic basics
- syntax: structure of a sentence
- semantics: truth in a model
- entailment: in all models of KB
- inference: derive new sentences; must be sound and complete
Propositional Logic (PL)
- simple true/false statements combined with , , , ,
- truth tables define semantics
- strength: simple, compositional
- weakness: cannot talk about objects/relations; low expressive power
Propositional Logic (PL) Examples
- Meaning: It is raining and it is cold.
- : “It is raining”
- : “It is cold”
- Meaning: If the door is not locked, then the alarm is on.
- : “The door is locked”
- : “The alarm is on”
- Meaning: Lights are on or motion is detected, and there is no power failure.
- : “Lights are on”
- : “Motion detected”
- : “Power failure”
First-Order Logic (FOL)
- adds objects, relations, functions, variables, quantifiers
- much more expressive than PL
First-Order Logic (FOL) Examples
- Meaning: Every student is smart.
- Meaning: John loves at least one person.
- Meaning: Richard is John’s brother, and John is a king.
FOL "at Google" patterns
- Meaning: Everyone at Google is smart.
- Meaning: Everyone is at Google, and everyone is smart.
- Meaning: Someone at Google is smart.
Quantifiers
- universal: → “for all x”
- correct pattern:
- existential: → “there exists x”
- correct pattern:
- quantifier properties:
- and commute with themselves, not with each other
- duality:
PL vs FOL
| Feature | PL | FOL |
|---|---|---|
| talks about | facts | objects + relations |
| variables | no | yes |
| quantifiers | no | , |
| expressiveness | low | high |
- implication equivalence: (X \rightarrow Y \equiv \neg X \lor Y) (tautology)
Philosophy & AI
Core questions
- what is a mind? how do human minds work?
- can non-human systems (like computers) have minds?
- what counts as thinking or understanding?
Weak & strong AI
- weak AI: AI produces useful tools and intelligent behaviour, but not real understanding or minds
- strong AI: a machine can literally have a mind, understanding, intentions, consciousness
- arguments raised against strong AI:
- some tasks may be impossible for computers, no matter how we program them
- certain designs of “intelligent programs” fail inherently
- programs may simulate intelligence without truly understanding
- practical limits: complexity, infeasibility of encoding full human cognition
Turing Test
- idea: if a machine can hold a conversation indistinguishable from a human, treat it as intelligent
- strengths:
- avoids metaphysical debates (“can machines think?”)
- focuses on observable behaviour
- critiques:
- measures performance, not inner understanding
- easy to foot naive interrogators
- does not assess reasoning, emotion, self-awareness
- machine may pass via tricks, not intelligence
- famous turing test objections:
- lovelace objection: machines cannot originate anything → they do what we tell them
- species-centricity: assumes humans must be more intelligent
- mathematical objection: godel style limits → formal systems cannot solve everything
- onsciousness objection: intelligence requires awareness, emotions, subjective experience
- diversity objection: humans vary widely; programs may not
Chinese room argument
- setup:
- person (doesn’t know chinese) goes in a room
- given chinese text (paragraphs) and questions, rules describing how to manipulate Chinese symbols from questions and text, and output corresponding Chinese text
- person is being the “computer processor”
- chinese room = syntax semantics; programs don’t understand
- claim:
- running a program (symbol manipulation) is not enough for understanding or intentionality
- strong AI is false: programs do not genuinely “understand” even if they behave correctly
- counterarguments:
- systems reply: the whole system understands, not the person
- brain simulator reply: simulating neural processes would produce understanding
- many mansions reply: non-digital mechanisms might produce real cognition
- robot reply (implied): embodiment may be required for meaning